2017
- SigVox-A 3D feature matching algorithm for automatic street object recognition in mobile laser scanning point clouds.
-
Authors:
Jinhu Wang, Roderik Lindenbergh, Massimo Menenti
Abstract:
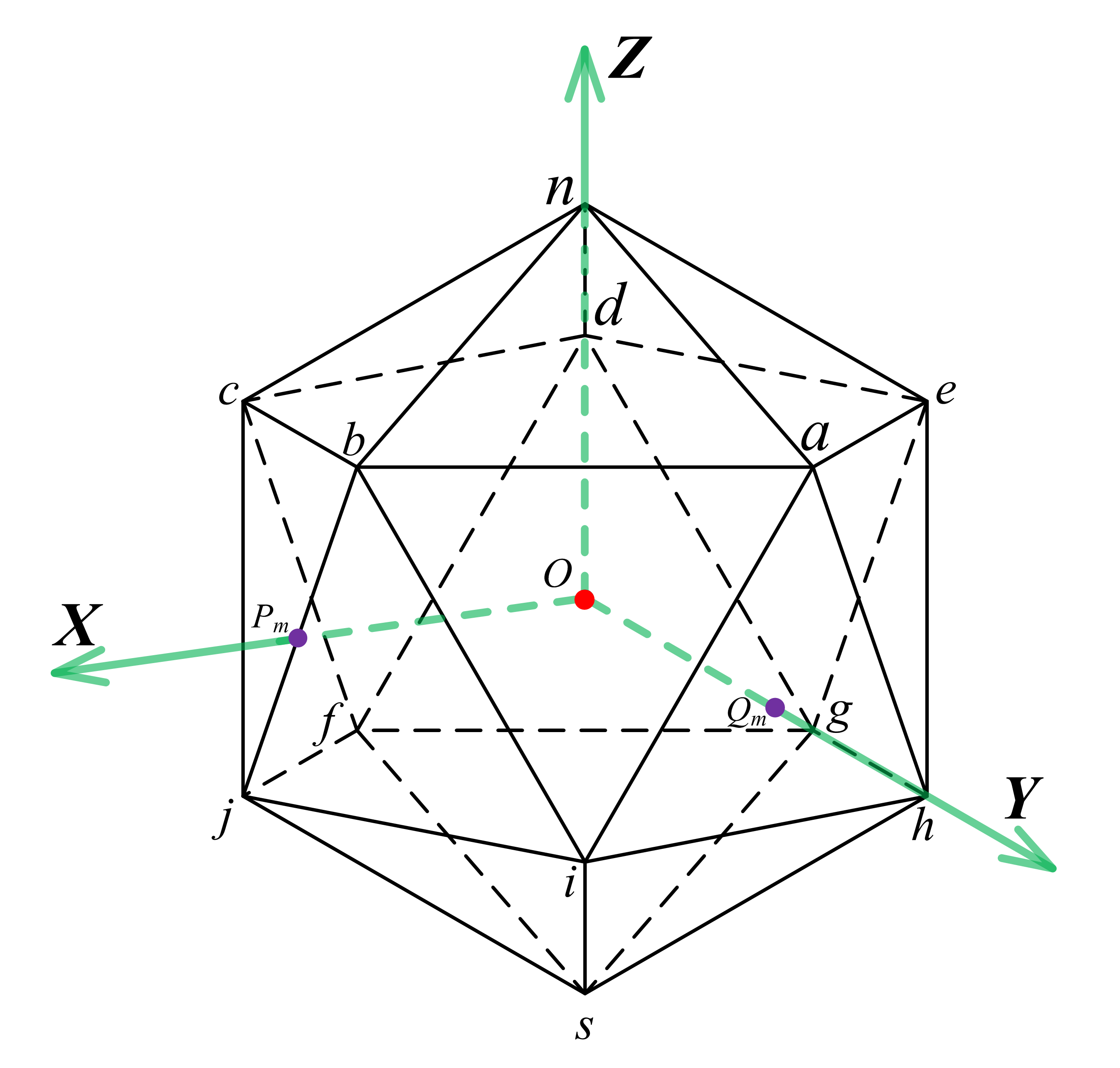
Urban road environments contain a variety of objects including different types of lamp poles and traffic signs. Its monitoring is traditionally conducted by visual inspection, which is time consuming and expensive. Mobile laser scanning (MLS) systems sample the road environment efficiently by acquiring large and accurate point clouds. This work proposes a methodology for urban road object recognition from MLS point clouds. The proposed method uses, for the first time, shape descriptors of complete objects to match repetitive objects in large point clouds. To do so, a novel 3D multi-scale shape descriptor is introduced, that is embedded in a workflow that efficiently and automatically identifies different types of lamp poles and traffic signs. The workflow starts by tiling the raw point clouds along the scanning trajectory and by identifying non-ground points. After voxelization of the non-ground points, connected voxels are clustered to form candidate objects. For automatic recognition of lamp poles and street signs, a 3D significant eigenvector based shape descriptor using voxels (SigVox) is introduced. The 3D SigVox descriptor is constructed by first subdividing the points with an octree into several levels. Next, significant eigenvectors of the points in each voxel are determined by principal component analysis (PCA) and mapped onto the appropriate triangle of a sphere approximating icosahedron. This step is repeated for different scales. By determining the similarity of 3D SigVox descriptors between candidate point clusters and training objects, street furniture is automatically identified. The feasibility and quality of the proposed method is verified on two point clouds obtained in opposite direction of a stretch of road of 4 km. 6 types of lamp pole and 4 types of road sign were selected as objects of interest. Ground truth validation showed that the overall accuracy of the ~170 automatically recognized objects is approximately 95%. The results demonstrate that the proposed method is able to recognize street furniture in a practical scenario. Remaining difficult cases are touching objects, like a lamp pole close to a tree.
Journal:
ISPRS Journal of Photogrammetry and Remote Sensing, Volume 128, June 2017, Pages 111-129.
2016
- Change Analysis in Structural Laser Scanning Point Clouds: The Baseline Method.
-
Authors:
Yueqian Shen, Roderik Lindenbergh, Jinhu Wang
Abstract:
A method is introduced for detecting changes from point clouds that avoids registration. For many applications, changes are detected between two scans of the same scene obtained at different times. Traditionally, these scans are aligned to a common coordinate system having the disadvantage that this registration step introduces additional errors. In addition, registration requires stable targets or features. To avoid these issues, we propose a change detection method based on so-called baselines. Baselines connect feature points within one scan. To analyze changes, baselines connecting corresponding points in two scans are compared. As feature points either targets or virtual points corresponding to some reconstructable feature in the scene are used. The new method is implemented on two scans sampling a masonry laboratory building before and after seismic testing, that resulted in damages in the order of several centimeters. The centres of the bricks of the laboratory building are automatically extracted to serve as virtual points. Baselines connecting virtual points and/or target points are extracted and compared with respect to a suitable structural coordinate system. Changes detected from the baseline analysis are compared to a traditional cloud to cloud change analysis demonstrating the potential of the new method for structural analysis.
Journal:
Sensors 2017, 17(1), 26; doi:10.3390/s17010026.
- A concealed car extraction method based on full-waveform LiDAR data.
-
Authors:
Chuanrong Li, Mei Zhou, Menghua Liu, Lian Ma, and Jinhu Wang
Abstract:
Concealed cars extraction from point clouds data acquired by airborne laser scanning has gained its popularity in recent years. However, due to the occlusion effect, the number of laser points for concealed cars under trees is not enough. Thus, the concealed cars extraction is difficult and unreliable. In this paper, 3D point cloud segmentation and classification approach based on full-waveform LiDAR was presented. This approach first employed the autocorrelation coefficient and the echo ratio to determine concealed cars areas. Then the points in the concealed cars areas were segmented with regard to elevation distribution of concealed cars. Based on the previous steps, a strategy integrating backscattered waveform features and the view histogram descriptor was developed to train sample data of concealed cars and generate the feature pattern. Finally concealed cars were classified by pattern matching. The approach was validated by full-waveform LiDAR data and experimental results demonstrated that the presented approach can extract concealed cars with accuracy more than 78.6% in the experiment areas.
Conference:
Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLI-B5, 581-586, 2016.
- Quality assessment and comparison of smartphone and Leica c10 laser scanner based point clouds.
-
Authors:
Beril Sirmacek, Roderik Lindenbergh, Jinhu Wang
Abstract:
3D urban models are valuable for urban map generation, environment monitoring, safety planning and educational purposes. For 3D measurement of urban structures, generally airborne laser scanning sensors or multi-view satellite images are used as a data source. However, close-range sensors (such as terrestrial laser scanners) and low cost cameras (which can generate point clouds based on photogrammetry) can provide denser sampling of 3D surface geometry. Unfortunately, terrestrial laser scanning sensors are expensive and trained persons are needed to use them for point cloud acquisition. A potential effective 3D modelling can be generated based on a low cost smartphone sensor. Herein, we show examples of using smartphone camera images to generate 3D models of urban structures. We compare a smartphone based 3D model of an example structure with a terrestrial laser scanning point cloud of the structure. This comparison gives us opportunity to discuss the differences in terms of geometrical correctness, as well as the advantages, disadvantages and limitations in data acquisition and processing. We also discuss how smartphone based point clouds can help to solve further problems with 3D urban model generation in a practical way. We show that terrestrial laser scanning point clouds which do not have color information can be colored using smartphones. The experiments, discussions and scientific findings might be insightful for the future studies in fast, easy and low-cost 3D urban model generation field.
Conference:
Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLI-B5, 581-586, 2016.
- Coarse point cloud registration by EGI matching of voxel clusters.
-
Authors:
Jinhu Wang*, Roderik Lindenbergh, Yueqian Shen, and Massimo Menenti
Abstract:
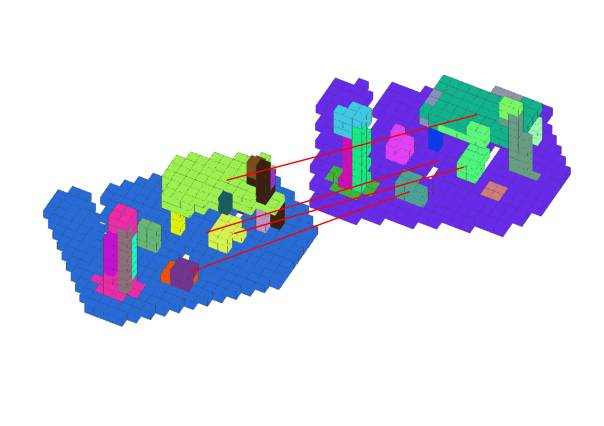
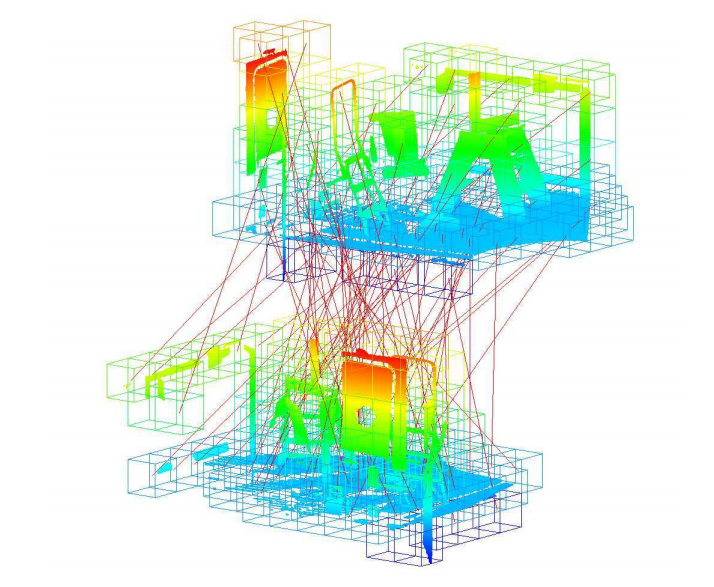
Laser scanning samples the surface geometry of objects efficiently and records versatile information as point clouds. However, often more scans are required to fully cover a scene. Therefore, a registration step is required that transforms the different scans into a common coordinate system. The registration of point clouds is usually conducted in two steps, i.e. coarse registration followed by fine registration. In this study an automatic marker-free coarse registration method for pair-wise scans is presented. First the two input point clouds are re-sampled as voxels and dimensionality features of the voxels are determined by principal component analysis (PCA). Then voxel cells with the same dimensionality are clustered. Next, the Extended Gaussian Image (EGI) descriptor of those voxel clusters are constructed using significant eigenvectors of each voxel in the cluster. Correspondences between clusters in source and target data are obtained according to the similarity between their EGI descriptors. The random sampling consensus (RANSAC) algorithm is employed to remove outlying correspondences until a coarse alignment is obtained. If necessary, a fine registration is performed in a final step. This new method is illustrated on scan data sampling two indoor scenarios. The results of the tests are evaluated by computing the point to point distance between the two input point clouds. The presented two tests resulted in mean distances of 7.6mm and 9.5mm respectively, which are adequate for fine registration.
Conference:
ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci., III-5, 97-103, 2016.
2015
- Automated large scale parameter extraction of road-side trees sampled by a laser mobile mapping system.
-
Authors:
D. Berthold, RC Lindenbergh, B. Sirmacek, M. Herrero-Huerta, D. Ebersbach, Jinhu Wang*
Abstract:
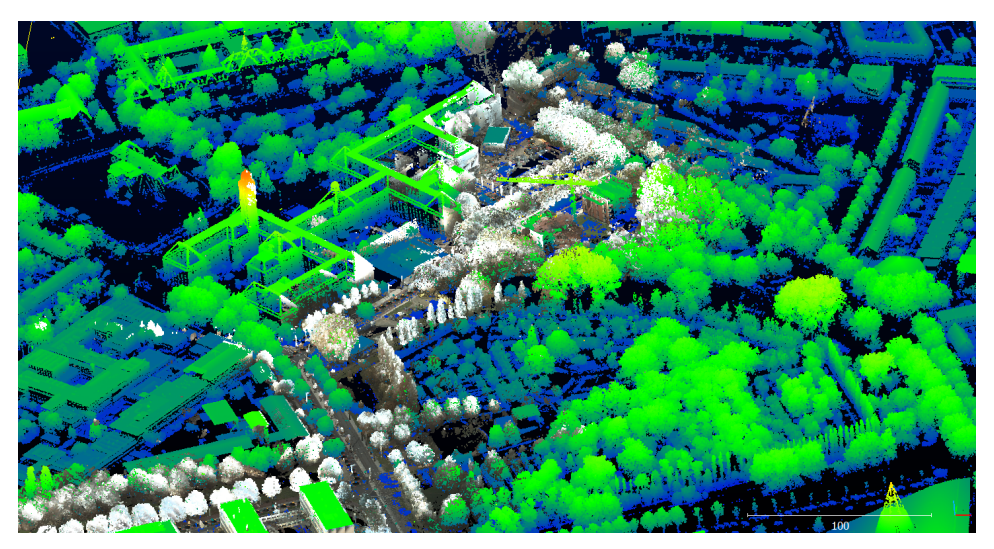
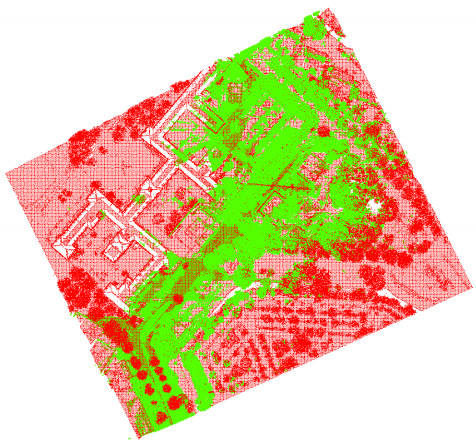
In urbanized Western Europe trees are considered an important component of the built-up environment. This also means that there isan increasing demand for tree inventories. Laser mobile mapping systems provide an efficient and accurate way to sample the 3D roadsurrounding including notable roadside trees. Indeed, at, say, 50 km/h such systems collect point clouds consisting of half a millionpoints per 100m. Method exists that extract tree parameters from relatively small patches of such data, but a remaining challengeis to operationally extract roadside tree parameters at regional level. For this purpose a workflow is presented as follows: The inputpoint clouds are consecutively downsampled, retiled, classified, segmented into individual trees and upsampled to enable automatedextraction of tree location, tree height, canopy diameter and trunk diameter at breast height (DBH). The workflow is implemented to work on a laser mobile mapping data set sampling 100 km of road in Sachsen, Germany and is tested on a stretch of road of 7km long.Along this road, the method detected 315 trees that were considered well detected and 56 clusters of tree points were no individualtrees could be identified. Using voxels, the data volume could be reduced by about 97 % in a default scenario. Processing the results of this scenario took ~2500 seconds, corresponding to about 10 km/h, which is getting close to but is still below the acquisition rate which is estimated at 50 km/h.
Conference:
Proceeding, ISPRS Geospatial Week 2015, 28 Sep-03 Oct, La Grande Motte, France.
- IQPC 2015 Track: Tree separation and classification in mobile mapping LiDAR data.
-
Authors:
Ben Gorte, Sander Oude Elberink, Beril Sirmacek, Jinhu Wang*
Abstract:
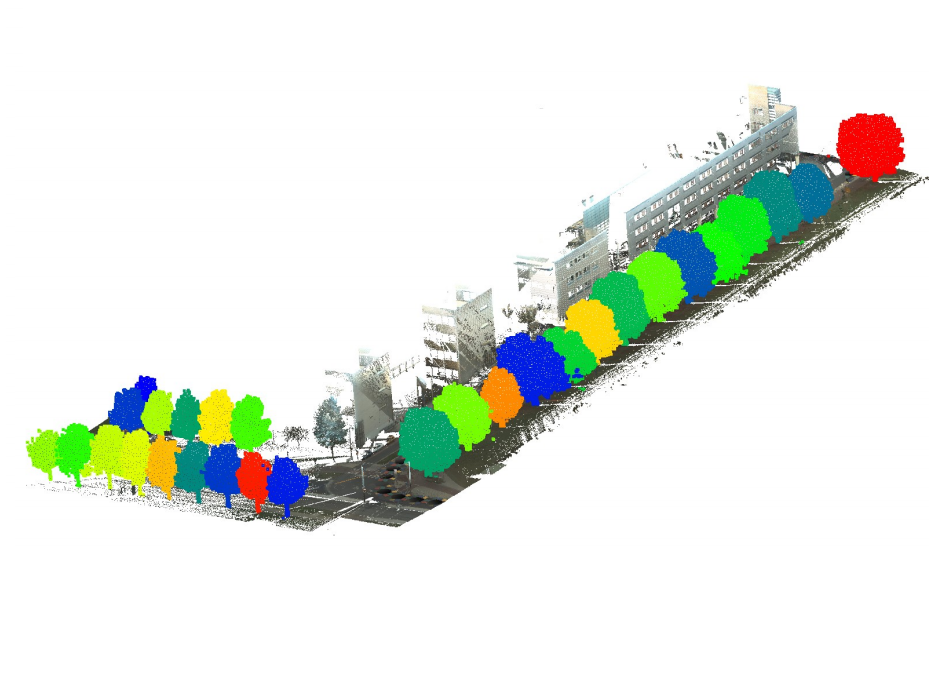
The European FP7 project IQmulus yearly organizes several processing contests, where submissions are requested for novel algorithms for point cloud and other big geodata processing. This paper describes the set-up and execution of a contest having the purpose to evaluate state-of-the-art algorithms for Mobile Mapping System point clouds, in order to detect and identify (individual) trees. By the nature of MMS these are trees in the vicinity of the road network (rather than in forests). Therefore, part of the challenge is distinguishing between trees and other objects, such as buildings, street furniture, cars etc. Three submitted segmentation and classification algorithms are thus evaluated.
Conference:
Proceeding, ISPRS Geospatial Week 2015, 28 Sep-03 Oct, La Grande Motte, France.
- Evaluating voxel enabled scalable intersection of large point clouds.
-
Authors:
Jinhu Wang*, Roderik Lindenbergh and Massimo Menenti
Abstract:
Laser scanning has become a well established surveying solution for obtaining 3D geo-spatial information on objects and environment. Nowadays scanners acquire up to millions of points per second which makes point cloud huge. Laser scanning is widely applied from airborne, carborne and stable platforms, resulting in point clouds obtained at different attitudes and with different extents. Working with such different large point clouds makes the determination of their overlapping area necessary but often time consuming. In this paper, a scalable point cloud intersection determination method is presented based on voxels. The method takes two overlapping point clouds as input. It consecutively resamples the input point clouds according to a preset voxel cell size. For all non-empty cells the center of gravity of the points in contains is computed. Consecutively for those centers it is checked if they are in a voxel cell of the other point cloud. The same process is repeated after interchanging the role of the two point clouds. The quality of the results is evaluated by the distance to the pints from the other data set. Also computation time and quality of the results are compared for different voxel cell sizes. The results are demonstrated on determining he intersection between an airborne and carborne laser point clouds and show that the proposed method takes 0.10%, 0.15%, 1.26% and 14.35% of computation time compared the the classic method when using cell sizes of of 10, 8, 5 and 3 meters respectively.
Conference:
Proceeding, ISPRS Geospatial Week 2015, 28 Sep-03 Oct, La Grande Motte, France.
2014
- Voxel based scalable registration of laser scanned point cloud data by neighbourhood voting.
-
Authors:
Jinhu Wang*, Roderik Lindenbergh and Massimo Menenti
Abstract:
We propose a novel technique for automatic scalable registration of 3D point cloud data acquired by laser scanners based on voxels. This algorithm is composed of two steps. Firstly, coarse registration. This step is achieved by first resampling the two point cloud data into 3D voxels of a uniform size. Then the second order moment features of the voxel are abstracted based on the points within the voxel, and afterwards neighborhood voting of the voxel is performed to strengthen the feature. Based on the correlation of the final voxel features of the two point clouds, correspondences between the two voxels are found. Consecutively the random sampling consensus (RANSAC) algorithm is employed to remove outlying correspondences until a coarse alignment can be made. Secondly, a fine registration is acquired in the final step by running the Iterative Closest Points (ICP) algorithm with just a few iterations
Conference:
Proceeding, IQMULUS 1st workshop on processing large geospatial data
- Geometric road runoff estimation from laser mobile mapping data.
-
Authors:
Jinhu Wang*, Higinio González-Jorge, Roderik Lindenbergh, Pedro Arias-Sánchez and Massimo Menenti
Abstract:
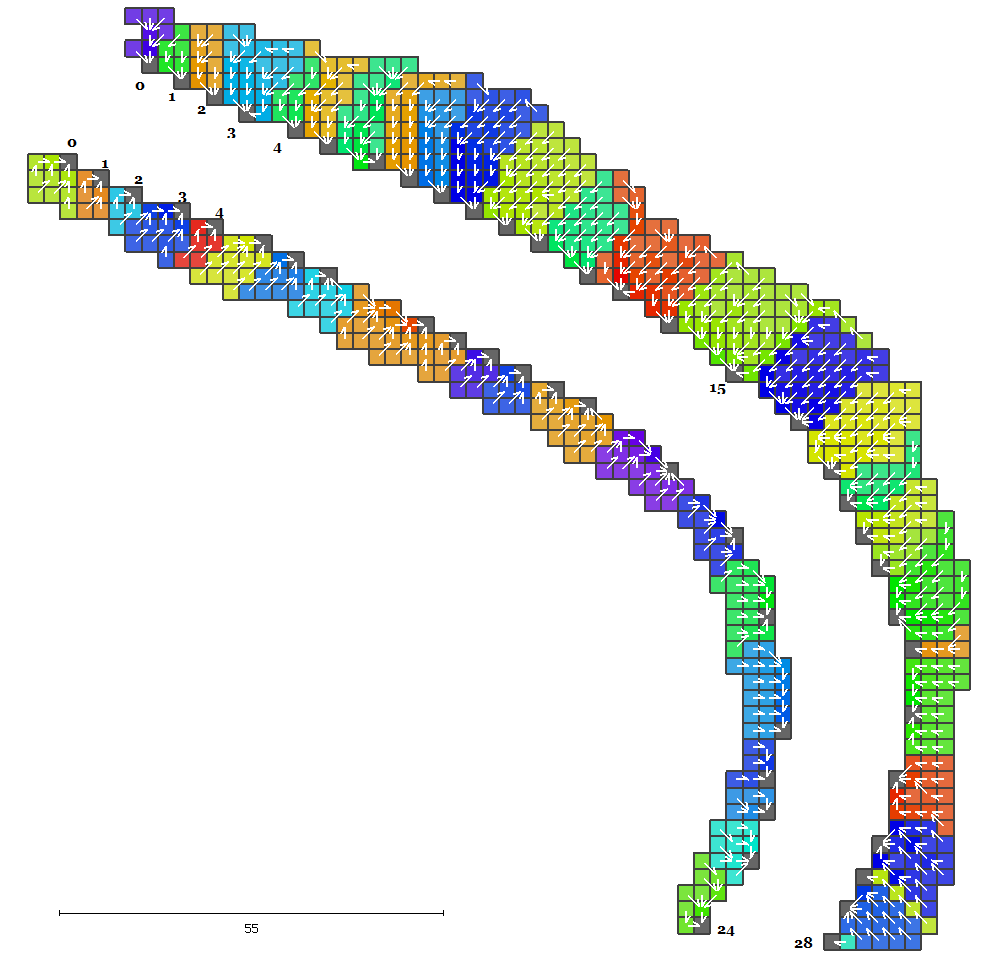
Mountain roads are the lifelines of remote areas but are often situated in complicated settings and prone to landslides, rock fall, avalanches and damages due to surface water runoff. The impact and likelihood of these types of hazards can be partly assessed by a detailed geometric analysis of the road environment. Field measurements in remote areas are expensive however. A possible solution is the use of a Laser Mobile Mapping System (LMMS) which, at high measuring rate, captures dense and accurate point clouds. This paper presents an automatic approach for the delineation of both the direct environment of a road and the road itself into local catchments starting from a LMMS point cloud. The results enable a user to assess where on the road most water from the surroundings will assemble, and how water will flow over the road after e.g. heavy snow melt or rainfall. To arrive at these results the following steps are performed. First outliers are removed and point cloud data is gridded at a uniform width. Local surface normal and gradient of each grid point are determined. The relative smoothness of the road is used as a criterion to identify the road's outlines. The local gradients are input for running the so-called D8 method, which simply exploits that surface water follows the direction of steepest descent. This method first enables the identification of sinks on the roadside, i.e. the locations where water flow accumulates and potentially enters the road. Moreover, the method divides the road's direct neighbourhood into catchments, each consisting of all grid cells having runoff to the same sink. In addition the method is used to analyse the surface flow over the road's surface. The new method is demonstrated on a piece of 153 meters long Galician mountain road as sampled by LMMS data.
Conference:
ISPRS Technical Commission V Symposium
2013
- Automatic Estimation of Excavation Volume from Laser Mobile Mapping Data for Mountain Road Widening.
-
Authors:
Jinhu Wang*, Higinio González-Jorge, Roderik Lindenbergh, Pedro Arias-Sánchez and Massimo Menenti
Abstract:
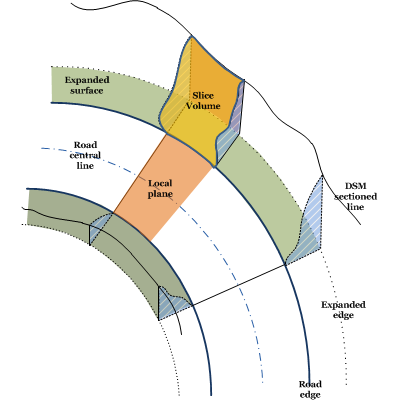
Roads play an indispensable role as part of the infrastructure of society. In recent years, society has witnessed the rapid development of laser mobile mapping systems (LMMS) which, at high measurement rates, acquire dense and accurate point cloud data. This paper presents a way to automatically estimate the required excavation volume when widening a road from point cloud data acquired by an LMMS. Firstly, the input point cloud is down-sampled to a uniform grid and outliers are removed. For each of the resulting grid points, both on and off the road, the local surface normal and 2D slope are estimated. Normals and slopes are consecutively used to separate road from off-road points which enables the estimation of the road centerline and road boundaries. In the final step, the left and right side of the road points are sliced in 1-m slices up to a distance of 4 m, perpendicular to the roadside. Determining and summing each sliced volume enables the estimation of the required excavation for a widening of the road on the left or on the right side. The procedure, including a quality analysis, is demonstrated on a stretch of a mountain road that is approximately 132 m long as sampled by a Lynx LMMS. The results in this particular case show that the required excavation volume on the left side is 8% more than that on the right side. In addition, the error in the results is assessed in two ways. First, by adding up estimated local errors, and second, by comparing results from two different datasets sampling the same piece of road both acquired by the Lynx LMMS. Results of both approaches indicate that the error in the estimated volume is below 4%. The proposed method is relatively easy to implement and runs smoothly on a desktop PC. The whole workflow of the LMMS data acquisition and subsequent volume computation can be completed in one or two days and provides road engineers with much more detail than traditional single-point surveying methods such as Total Station or GPS profiling. A drawback is that an LMMS system can only sample what is within the view of the system from the road.
Journal:
Remote Sensing 2013, 5(9), 4629-4651; doi:10.3390/rs5094629
- Analysis of airborne full-waveform LiDAR data for supervised point cloud classification.
-
Authors:
Jinhu Wang*, Mei Zhou, Chuanrong Li
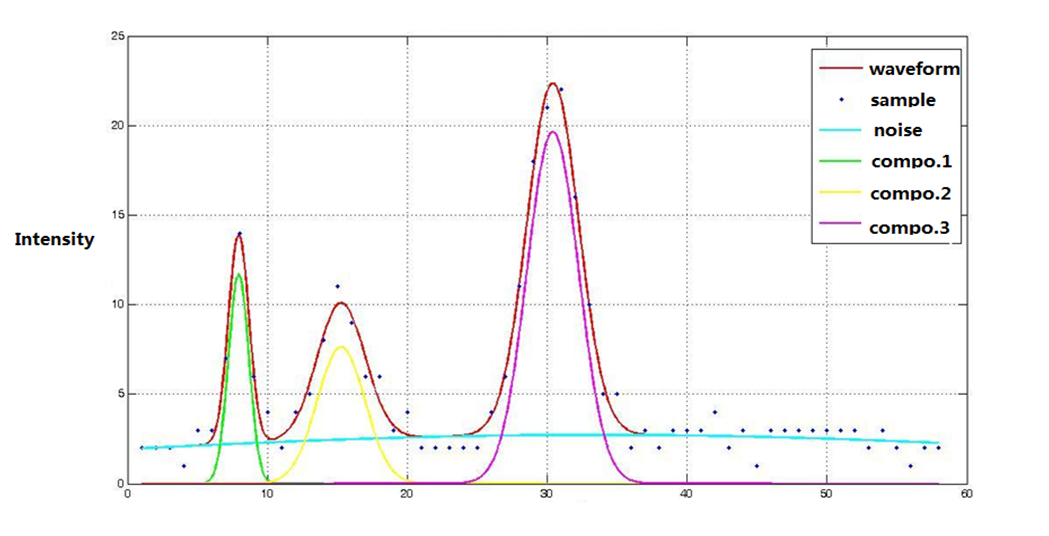
Abstract:
Full-waveform LiDAR takes little-time-interval samples of both the emitted and targets backscattered pulse, could nearly record the entire waveform of both the emitted and backscattered pulses. This paper takes advantages of small footprint airborne full-waveform LiDAR data characters and combines the distinct impact mechanism of laser pulse with the plane and solid targets based on the energy equation, presents an approach of waveform modeling and decomposition taking generalized Gaussian as core function. Afterwards, by generating a decision tree and merging together the components parameters, that derived from waveform decomposition and parameters abstraction, including range, amplitude, width and cross-section, the supervised points cloud classification processing was carried out to perform the objects classification. The results of this experiment validate the feasibility and effectiveness of the data processing procedure proposed in this paper and could be of substantial importance to further targets detection and identification, also could be applied to targets measuring and segmentation.
Journal:
Remote Sensing Information
- Enhanced component detection algorithm of full-waveform LiDAR data.
-
Authors:
Mei Zhou, Menghua Liu, Zheng Zhang, Jinhu Wang
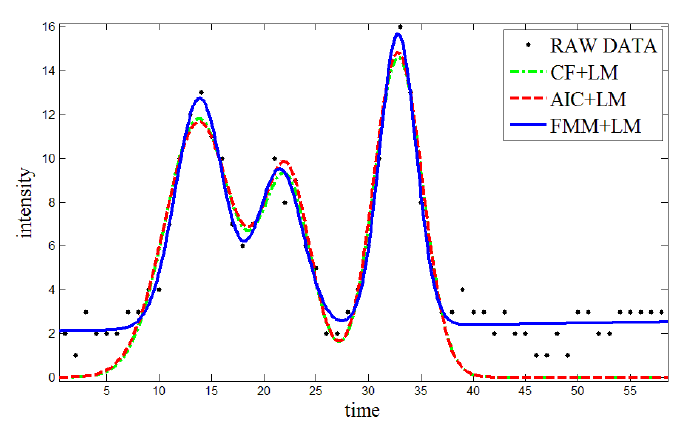
Abstract:
When full-waveform LiDAR (FW-LiDAR) data are applied to extract the component feature information of interest targets, there exist a problem of components lost during the waveform decomposition procedure, which severely constrains the performance of subsequent targets information extraction. Focusing on the problem above, an enhance component detection algorithm, which combines Finite Mixed Method (FMM), Levenberg-Marquardt (LM) algorithm and Penalized Minimum Matching Distance (PMMD),is proposed in this paper. All of the algorithms for parameters initialization, waveform decomposition and missing component detection have been improved, which greatly increase the precision of component detection, and guarantee the precision of waveform decomposition that could help the weak information extraction of interest targets. The effectiveness of this method is verified by the experimental results of simulation and measured data.
Conference:
2013 ISPRS Hannover Workshop, Volume XL-1/W1
2012
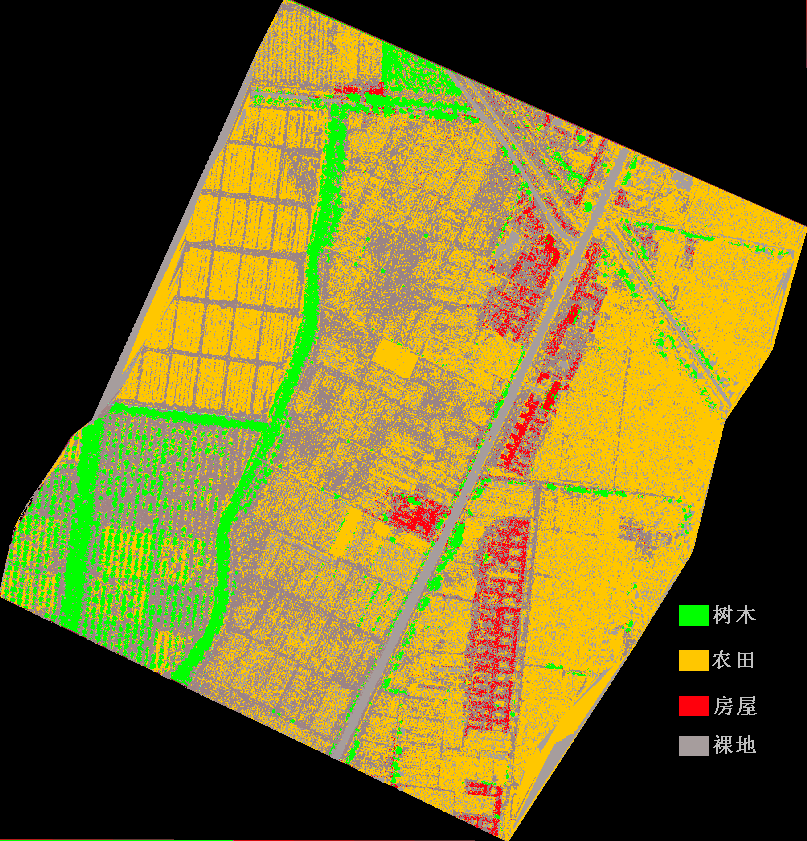
- A comparison of two different approaches of point cloud classificatioin based on full-waveform LiDAR data.
-
Authors:
Jinhu Wang*, Chuanrong Li, Lingli Tang, Mei Zhou and Jinmei Li
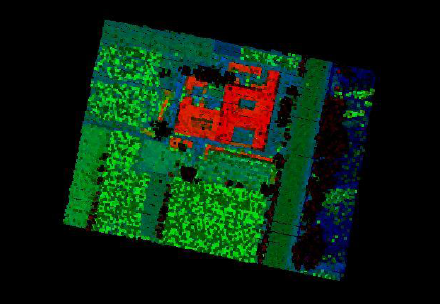
Abstract:
In this paper, two different point cloud classification approaches were applied based on the full-waveform LiDAR data. At the beginning, based on the full-waveform LiDAR data, we decomposed the backscattered pulse waveform and abstracted each component in the waveform after the pre-processing of noise detection and waveform smoothing. And by the time flag of each component acquired in the decomposition procedure we calculated the three dimension coordination of the component. Then the components waveform properties, including amplitude, width and cross-section, were uniformed respectively and formed the Amplitude/Width/Section space. Then two different approaches were applied to classify the points. First, we selected certain targets and trained the parameters, after that, by the supervised classification way we segmented the study area point. On the other hand, we apply the IHSL colour transform to the above space to find a new space, RGB colour space, which has a uniform distinguishability among the parameters and contains the whole information of each component in Amplitude/Width/Section space. Then the fuzzy C-means algorithm is applied to the derived RGB space to complete the LiDAR point classification procedure. By comparing the two different segmentation results, which may of substantial importance for further targets detection and identification, a brief discussion and conclusion were brought out for further research and study.
Conference:
2012 XXII ISPRS Congress, Volume XXXIX-B3
- Airborne full-waveform LiDAR data processing and application
-
Authors:
Jinhu Wang*, Chuanrong Li, Mei Zhou
Abstract:
Airborne small-footprint full-waveform LiDAR data processing and its application has become a rising topic in the past years. This paper firstly describes the data features of the full-waveform LiDAR and then introduces the data acquisition mechanism and general data processing procedure. Based on current research status, the theories and approaches in data involved are discussed in detail. Finally, the prospect of full-waveform LiDAR data processing and application are analyzed, which would be taken as reliable reference and guidance for full-waveform LiDAR data processing and applications.
Journal:
Foreign Electronic Measurement Technology, 2012(6)